自动驾驶
最多支持 16 通道 GMSL1/2 摄像头输入
最高支持 8通道 8MP分辨率摄像头
PCIE3.0 X16
支持Linux 操作系统,使用V4L2 框架驱动

总线
支持 GMSL1 / GMSL2
解串器
MAX96712
POC 供电
单通道 Max 1A@12V
通道数
16 通道摄像头输入
视频格式
YUV422、RGB888、RAW12
PCIE
PCI Express Gen 3 x16
输出分辨率
1920*1080@30fps 最多支持 16 路
4096×2160@30fps 最多支持 8 路
网络
10/100/1000M 自适应,支持 PTP 授时时间戳,精度小于 1ms
串行器
支持 MAX96705 / MAX9295A / MAX96717F/MAX96717 等
线缆长度
GMSL1 模式下可达 40 米(3Gbps)
GMSL2 模式下可达 20 米(6Gbps)
GPS
支持 GPS 授时同步
外部触发
支持摄像头外部触发同步
升级
支持 PC 端固件升级
架构
支持 V4L2 软件架构
I/0 接口
TTL 触发,GPS
FAKRA
4 合 1 Amphenal Z code min-Fakra
工作温度
-40℃ ~ 70℃
存储温度
-40℃ ~ 85℃
工作湿度
10%~90%
存储湿度
0~90%
供电
PCIE 供电 / 12V 供电
重量
重量 400g
尺寸
长宽:111.15 * 189.99(mm)
MTBF
5 年
主机系统
已测试过 Linux 内核版本: UBuntu16-linux4.15.0-142、UBuntu18-linux5.4.0-144、UBuntu20-linux5.15.0-67
功能支持
支持 Linux 操作系统,使用 V4L2 框架驱动;
支持 AXI 接口扩展外设,并支持外设使用 MSI 中断;
支持标准 IIC 和 UART 设备;
内存模式支持 USERPTR 及 MMAP;
支持通过 IIC 总线对摄像头配置及查询操作;
常用操作
VIDIOC_DQBUF, VIDIOC_QBUF
VIDIOC_STREAMOFF, VIDIOC_STREAMON
VIDIOC_REQBUFS, VIDIOC_QUERYBUF
VIDIOC_QUERYCAP, VIDIOC_QUERYCTRL
VIDIOC_G_PARM,VIDIOC_S_PARM
VIDIOC_G_FMT, VIDIOC_S_FMT
VIDIOC_G_CTRL,VIDIOC_S_CTRL
对外接口在挡板处共引出 1 路千兆以太网,4 路四合一 Fakra 接口(16 路视频)以及 1 路航空插座 M8

采用 M8 6pin 的航空插座(公座),用于 GPS 通信和外部触发输入
PIN 脚
1
FPGA_TRIG
输入
外部摄像头同步触发
2
GPS_PPS
输入
GPS PPS 同步输入
3
GPS_RXD
输入
GPS 串口通信 RXD,TTL 电平
4
GPS_TXD
输出
GPS 串口通信 TXD,TTL 电平
5
GND
-
参考地
6
GPS 电源
输出
默认 3.3V 输出,支持 5V(可选)


项目
功耗(W)
备注
静态功耗
8.58
不接入摄像头模组
动态功耗
47.75
接入 16 个摄像头模组
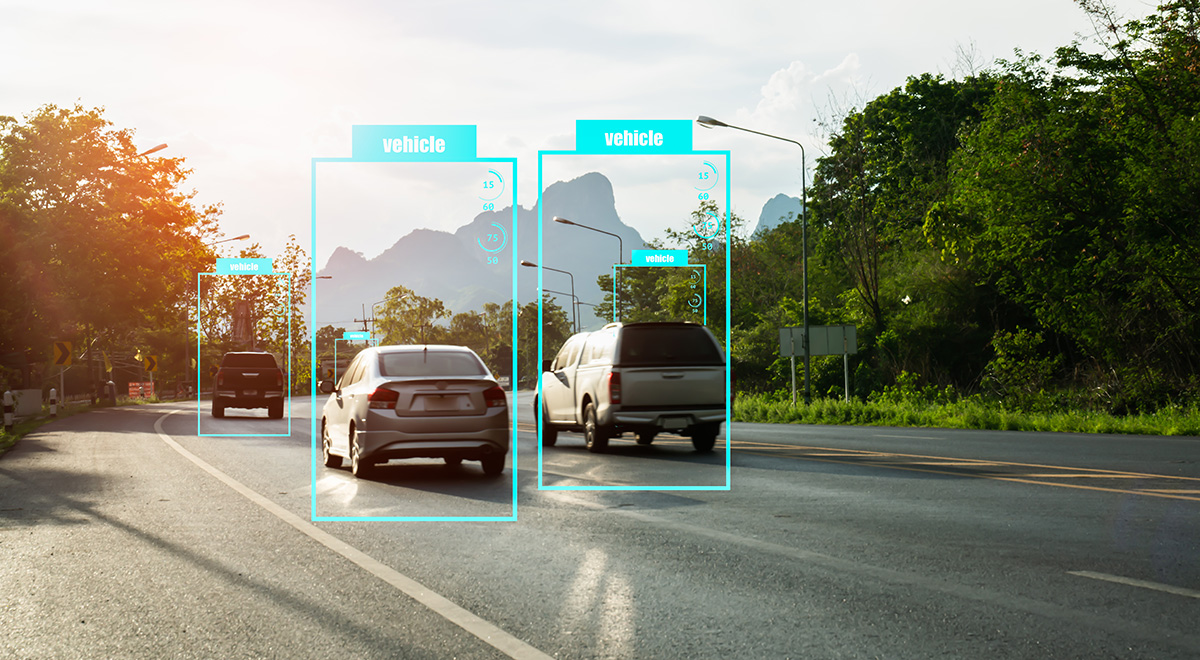
自动驾驶车辆采集计算平台方案

用于无人驾驶系统摄像头视频采集传输

用于数据采集车辆的摄像头视频采集传输

用于ADAS、自动驾驶测试系统摄像头接入后视频还原

多角度监控车辆换电行为,实时将数据上传到主机进行分析处理

Copyright © 芯驿电子科技(上海)有限公司 All Rights Reserved 沪ICP备13046728号